I recently nerded out about high-energy proton interaction with matter, enjoying reading up on the Bethe equation at the Particle Data Group review and elsewhere. That got me to look around at the PDL website, which is full of awesome stuff – everything from math and physics reviews to data for the most obscure “particles” ever, plus tests of how conserved the conservation laws are.
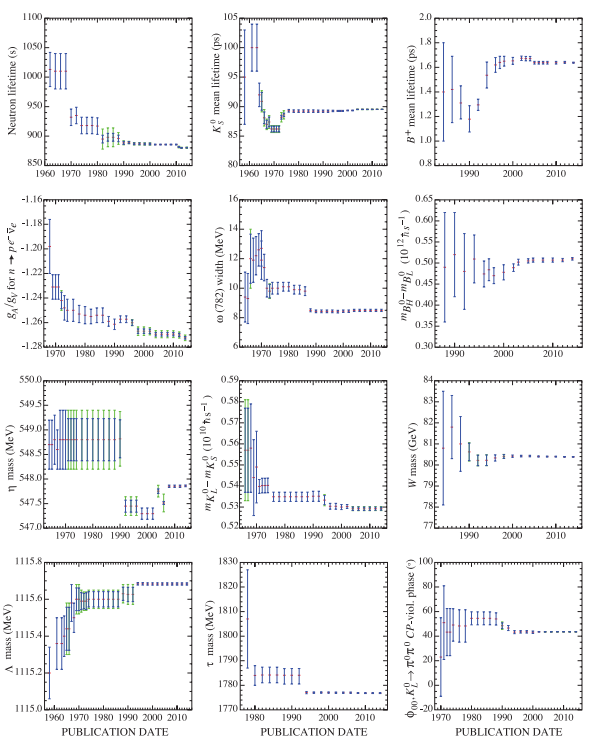
Historical graph of physical constant estimates from K.A. Olive et al. (Particle Data Group), Chin. Phys. C, 38, 090001 (2014) and 2015 update.
The first thing that strikes the viewer is that they have moved a fair bit, including often being far outside the original error bars. 6 of them have escaped them. That doesn’t look very good for science!
Fortunately, it turns out that these error bars are not 95% confidence intervals (the most common form in many branches of science) but 68.3% confidence intervals (one standard deviation, if things are normal). That means having half of them out of range is entirely reasonable! On the other hand, most researchers don’t understand error bars (original paper), and we should be able to do much better.
Sometimes large changes occur. These usually reflect the introduction of significant new data or the discarding of older data. Older data are discarded in favor of newer data when it is felt that the newer data have smaller systematic errors, or have more checks on systematic errors, or have made corrections unknown at the time of the older experiments, or simply have much smaller errors. Sometimes, the scale factor becomes large near the time at which a large jump takes place, reflecting the uncertainty introduced by the new and inconsistent data. By and large, however, a full scan of our history plots shows a dull progression toward greater precision at central values quite consistent with the first data points shown.
Overall, kudos to PDG for showing the history and making it clearer what is going on! But I do not agree it is a dull progression.
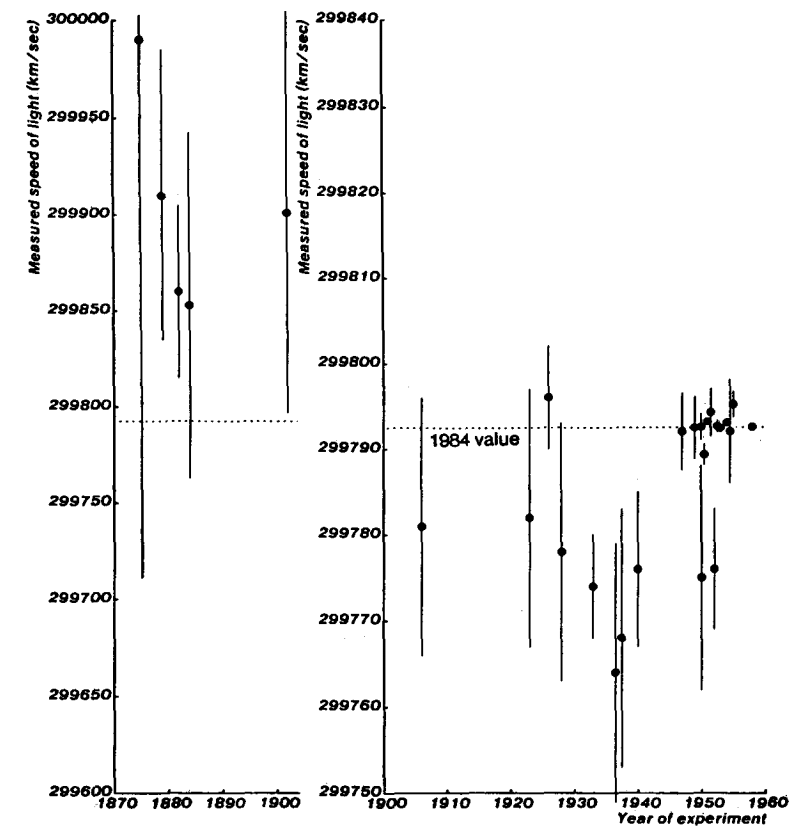
Plot of light-speed measurements 1875-1958. Error bars are standard error. From Max Henrion and Baruch Fischhoff. Assessing uncertainty in physical constants. American Journal of Physics 54, 791 (1986); doi: 10.1119/1.14447.
Note that the shifts were far larger than the estimated error bars. The dip in the 1930s and 40s even made some physicists propose that c could be changing over time. Overall Henrion and Fischhoff find that physicists have been rather overconfident in their tight error bounds on their measurements. The approach towards current estimates is anything but dull, and hides many amusing historical anecdotes.
Stories like this might have been helpful; it is notable that the PDG histories on the right, for newer constants, seem to stay closer to the present value than the longer ones to the left. Maybe this is just because they have not had the time to veer off yet, but one can be hopeful.
Still, even if people are improving this might not mean the conclusions stay stable or approach truth monotonically. A related issue is “negative learning”, where more data and improved models make the consensus view of a topic move in the wrong direction: Oppenheimer, M., O’Neill, B. C., & Webster, M. (2008). Negative learning. Climatic Change, 89(1-2), 155-172. Here the problem is not just that people are overconfident in how certain they can be about their conclusions, but also that there is a bit of group-think, plus that the models change in structure and are affected in different ways by the same data. They point out how estimates of ozone depletion oscillated, or the consensus on the stability of climate has shifted from oscillatory (before 1968) towards instability (68-82), towards stability (82-96), and now towards instability again (96-06). These problems are not due to mere irrationality, but the fact that as we learn more and build better models these incomplete but better models may still deviate strongly from the ground truth because they miss some key component.
Noli fumare
This is related to what Nick Bostrom calls the “data fumes” problem. Early data will be fragmentary and explanations uncertain – but the data points and their patterns are very salient, just as the early models, since there is nothing else. So we begin to anchor on them. Then new data arrives and the models improve… and the old patterns are revealed as statistical noise, or bugs in the simulation or plotting routine. But since we anchored on them, we are unlikely to update as strongly towards the new most likely estimates. Worse, accommodating a new model takes mental work; our status quo bias will be pushing against the update. Even if we do accommodate the new state, things will likely change more – we may well end up either with a view anchored on early noise, or assume that the final state is far more uncertain than it actually is (since we weigh the early jumps strongly because of their saliency).
This is of course why most people prefer to believe a charismatic diet cultleader expert rather than trying to dig through 70 years of messy, conflicting dietary epidemiology.
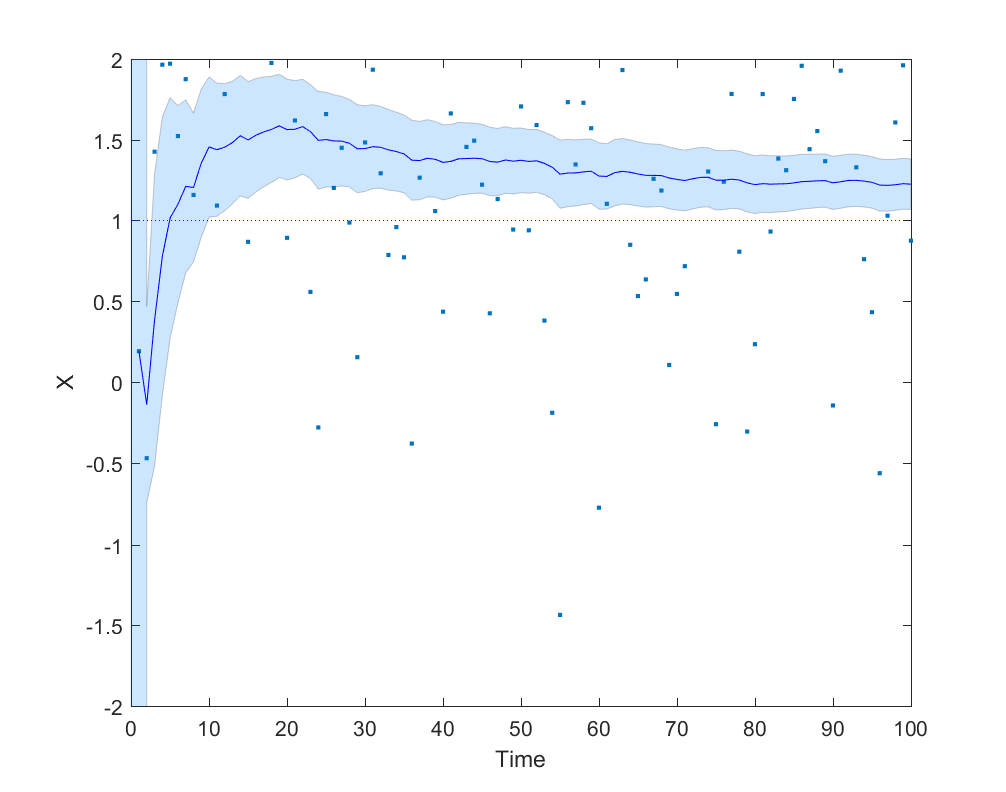
Here is a simple example where an agent is trying to do a maximum likelihood estimation of a Gaussian distribution with mean 1 and variance 1, but is hamstrung by giving double weight to the first 9 data points:
Simple data fume model, showing the slow and biased convergence when the first 9 data points are over-weighted. The blue area is a 95% confidence interval for the mean of the generating Gaussian distribution.
It is not hard to complicate the model with anchoring/recency/status quo bias (estimates get biased towards previous estimates), or that early data points are more polluted by differently distributed noise. Asymmetric error checking (you will look for bugs if results deviate from expectation and hence often find such bugs, but not look for bugs making your results closer to expectation) is another obvious factor for how data fumes can get integrated in models.
The problem with data fumes is that it is not easy to tell when you have stabilized enough to start trusting the data. It is even messier when the inputs are results generated by your own models or code. I like to approach it by using multiple models to guesstimate model error: for example, one mathematical model on paper and one Monte Carlo simulation – if they don’t agree, then I should disregard either answer and keep on improving.
Even when everything seems to be fine there may be a big crucial consideration one has missed. The Turing-Good estimator gives another way of estimating the risk of that: if you have acquired data points and seen big surprises (remember that the first data point counts as one!), then the probability of a new surprise for your next data point is . So if you expect data points in total, when you can start to trust the estimates… assuming surprises are uncorrelated etc. Which you will not be certain about. The progression towards greater precision may be anything but dull.
What have we learned since 1957? Did we predict what it would be? And what does it tell us about our future?
Some notes for the panel discussion “‘We’ve never had it so good’ – how does the world today compare to 1957?” 11 May 2015 by Dr Anders Sandberg, James Martin Research Fellow at the Future of Humanity Institute, Oxford Martin School, Oxford University.
Taking the topic “how does the world today compare to 1957?” a bit literally and with a definite technological bent, I started reading old issues of Nature to see what people were thinking about back then.
Technology development
Space
In 1957 the space age began.
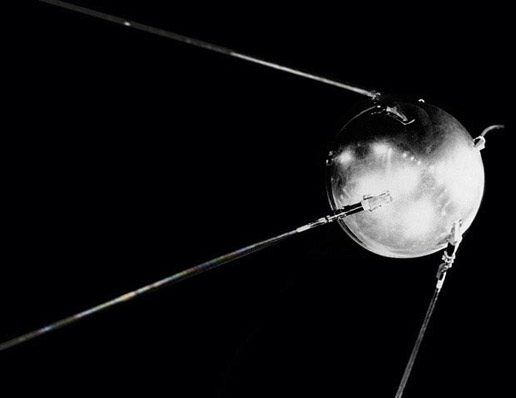
Sputnik 1
Sputnik 1, the first artificial satellite, was launched on 4 October 1957. On November 3 Sputnik 2 was launched, with Laika, the first animal to orbit the Earth. The US didn’t quite manage to follow up within the year, but succeeded with Explorer 1 in January 1958.
Right now, Voyager 1 is 19 billion km from earth, leaving the solar system for interstellar space. Probes have visited all the major bodies of the solar system. There are several thousand satellites orbiting Earth and other bodies. Humans have set their footprint on the Moon – although the last astronaut on the moon left closer to 1957 than the present.
There is a pair of surprises here. The first is how fast humanity went from primitive rockets and satellites to actual moon landings – 12 years. The second is that the space age did not grow into a roaring colonization of the cosmos, despite the confident predictions of nearly anybody in the 1950s. In many ways space embodies the surprises of technological progress – it can go both faster and slower than expected, often at the same time.
Nuclear
1957 also marks the first time that power was generated from a commercial nuclear plant, at Santa Susana, California, and the first full-scale nuclear power plant (Shippingport, Pennsylvania). Now LA housewives were cooking with their friend the atom! Ford announced their Nucleon atomic concept car 1958 – whatever the future held, it was sure to be nuclear powered!
Except that just like the Space Age the Atomic Age turned out to be a bit less pervasive than imagined in 1957.
One reason might be found in the UK Windscale nuclear power plant accident on 10th October 1957. Santa Susana also turned into an expensive superfund clean-up site. Making safe and easily decommissioned nuclear plants turned out to be far harder than imagined in the 1950s. Maybe, as Freeman Dyson has suggested[1], the world simply choose the wrong branch of the technology tree to walk down, selecting the big and complex plants suitable for nuclear weapons isotopes rather than small, simple and robust plants. In any case, today nuclear power is struggling both against cost and broadly negative public perceptions.
In April 1957 IBM sells the first compiler for the FORTRAN scientific programming language, as a hefty package of punched cards. This represents the first time software allowing a computer to write software is sold.
The term “artificial intelligence” had been invented the year before at the famous Dartmouth conference on artificial intelligence, which set out the research agenda to make machines that could mimic human problem solving. Newell, Shaw and Simon demonstrated the General Problem Solver (GPS) in 1957, a first piece of tangible progress.
While the Fortran compiler was a completely independent project it does represent the automation of programming. Today software development involves using modular libraries, automated development and testing: a single programmer can today do projects far outside what would have been possible in the 1950s. Cars run software on the order of 100s of million lines of code, and modern operating systems easily run into the high tens of millions of lines of code[2].
Moore’s law, fitted with Jacknifed sigmoids. Green lines mark 98% confidence interval. Data from Nordhaus.
In 1957 Moore’s law was not yet coined as a term, but the dynamics was already ongoing: computer operations per second per dollar was increasing exponentially (this is the important form of Moore’s law, rather than transistor density – few outside the semiconductor industry actually care about that). Today we can get about 440 billion times as many computations per second per dollar now as in 1957. Similar laws apply to storage (in 1956 IBM shipped the first hard drive in the RAMAC 305 system. The drive held 5MB of data at $10,000 a megabyte, as big as two refrigerators), memory prices, sizes of systems and sensors.
This tremendous growth have not only made complex and large programs possible, or enabled supercomputing (today’s best supercomputer is about 67 billion times more powerful than the first ones in 1964), but has also allowed smaller and cheaper devices that can be portable and used everywhere. The performance improvement can be traded for price and size.
In 1957 the first electric watch – the Hamilton Ventura – was sold. Today we have the Apple watch. Both have the same main function, to show off the wealth of their owner (and incidentally tell time), but the modern watch is also a powerful computer able to act as a portal into our shared information world. Embedded processors are everywhere, from washing machines to streetlights to pacemakers.
Why did the computers take off? Obviously there was a great demand for computing, but the technology also contained the seeds of making itself more powerful, more flexible, cheaper and useful in ever larger domains. As Gordon Bell noted in 1970, “Roughly every decade a new, lower priced computer class forms based on a new programming platform, network, and interface resulting in new usage and the establishment of a new industry.”[3]
At the same time, artificial intelligence has had a wildly bumpy ride. From confident predictions of human level intelligence within a generation to the 1970s “AI winter” when nobody wanted to touch the overhyped and obsolete area, to the current massive investments in machine learning. The problem was to a large extent that we could not tell how hard problems in the field were: some like algebra and certain games yielded with ease, others like computer vision turned out to be profoundly hard.
Biotechnology
In 1957 Francis Crick laid out the “central dogma of molecular biology”, which explained the relationship between DNA, RNA, and proteins (DNA is translated into RNA, which is translated into proteins, and information only flows this way). The DNA structure had been unveiled four years earlier and people were just starting to figure out how genetics truly worked.
(Incidentally, the reason for the term “dogma” was that Crick, a nonbeliever, thought the term meant something that was unsupported by evidence and just had to be taken by faith, rather than the real meaning of the term, something that has to be believed no matter what. Just like “black holes” and the “big bang”, names deliberately coined to mock, it stuck.)
It took time to learn how to use DNA, but in the 1960s we learned the language of the genetic code, by the early 1970s we learned how to write new information into DNA, by the 1980s commercial applications began, by the 1990s short genomes were sequenced…
Today we have DNA synthesis machines that can be bought on eBay, unless you want to order your DNA sequence online and get a vial in the mail. Conversely, you can send off a saliva sample and get a map (or the entire sequence) of your genome back. The synthetic biology movement are sharing “biobricks”, modular genetic devices that can be combined and used to program cells. Students have competitions in genetic design.
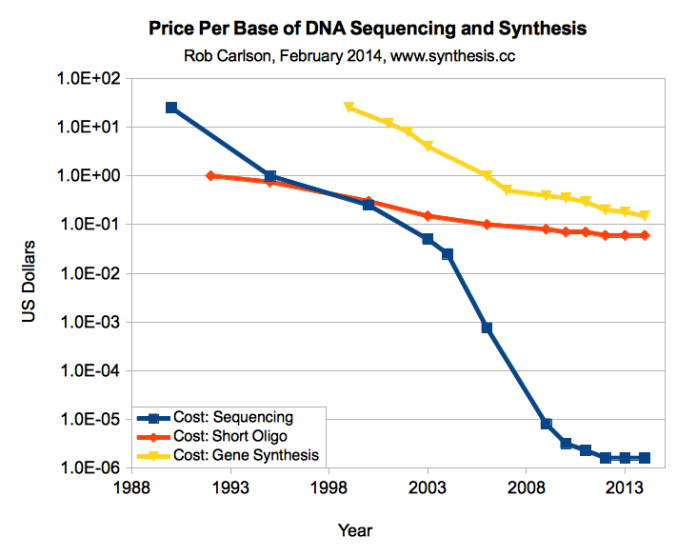
The dramatic fall in price of DNA sequencing and synthesis mimics Moore’s law and is in some sense a result of it: better computation and microtechnology enables better biotechnology. Conversely, the cheaper it is, the more uses can be found – from marking burglars with DNA spray to identifying the true origins of sushi. This also speeds up research, leading to discoveries of new useulf tricks, for example leading to the current era of CRISPR/Cas genetic editing which promises vastly improved precision and efficiency over previous methods.
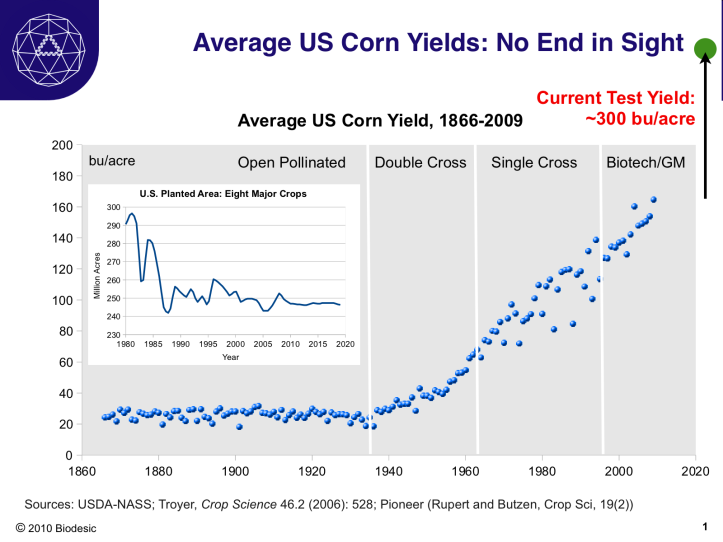
Biotechnology is of course more than genetics. One of the most important aspects of making the world better is food security. The gains in agricultural productivity have also been amazing. One of the important take-home messages in the above graph is that the improvement began before we started to explicitly tinker with the genes: crossing methods in the post-war era already were improving yields. Also, the Green Revolution in the 1960s was driven not just by better varieties, but by changes in land use, irrigation, fertilization and other less glamorous – but important – factors. The utility of biotechnology in the large is strongly linked to how it fits with the infrastructure of society.
Learning about what is easy and hard requires experience. Space was on one hand easy – it only took 17 years from Sputnik before the astronauts left the moon – but making it sustained turned out to be hard. Nuclear power was easy to make, but hard to make safe enough to be cheap and acceptable. Software has taken off tremendously, but compilers have not turned into “do what I mean” – yet routine computer engineering is regularly producing feats beyond belief that have transformed our world. AI has died the hype death several times, yet automated translation, driving, games, logistics and information services are major business today. Biotechnology had a slow ramp-up, then erupted and now schoolchildren modifying genes – yet heavy resistance holds it back, largely not because of any objective danger but because of cultural views.
If we are so bad at predicting what future technology will transform the world, what are we to do when we are searching for the Next Big Thing to solve our crises? The best approach is to experiment widely. Technologies with low thresholds of entry – such as software and now biotechnology – allow for more creative exploration. More people, more approaches and more aims can be brought to bear, and will find unexpected use for them.
The main way technologies become cheap and ubiquitous is that they are mass produced. As long as spacecraft and nuclear reactors nearly one-offs they will remain expensive. But as T. P. Wright observed, the learning curve makes each new order a bit cheaper or better. If we can reach the point where many are churned out they will not just be cheap, they will also be used for new things. This is the secret of the transistor and electronic circuit: by becoming so cheap they could be integrated anywhere they also found uses everywhere.
So the most world-transforming technologies are likely to be those that can be mass-produced, even if they from the start look awfully specialized. CCDs were once tools for astronomy, and now are in every camera and phone. Cellphones went from a moveable telephone to a platform for interfacing with the noosphere. Expect the same from gene sequencing, cubesats and machine learning. But predicting what technologies will dominate the world in 60 years’ time will not be possible.
Are we better off?
Having more technology, being able to reach higher temperatures, lower pressures, faster computations or finer resolutions, does not equate to being better off as humans.
Healthy and wise
Life expectancy (male and female) in England and Wales.
Perhaps the most obvious improvement has been health and life expectancy. Our “physiological capital” has been improving significantly. Life expectancy at birth has increased from about 70 in 1957 to 80 at a steady pace. The chance of living until 100 went up from 12.2% in 1957 to 29.9% in 2011[4].
The most important thing here is that better hygiene, antibiotics, and vaccinations happened before 1957! They were certainly getting better afterwards, but the biggest gains were likely early. Since 1957 it is likely that the main causes have been even better nutrition, hygiene, safety, early detection of many conditions, as well as reduction of risk factors like smoking.
Advanced biomedicine certainly has a role here, but it has been smaller than one might be led to think until about the 1970s. “Whether or not medical interventions have contributed more to declining mortality over the last 20 years than social change or lifestyle change is not so clear.”[5] This is in many ways good news: we may have a reserve of research waiting to really make an impact. After all, “evidence based medicine”, where careful experiment and statistics are applied to medical procedure, began properly in the 1970s!
A key factor is good health habits, underpinned by research, availability of information, and education level. These lead to preventative measures and avoiding risk factors. This is something that has been empowered by the radical improvements in information technology.
Consider the cost of accessing an encyclopaedia. In 1957 encyclopaedias were major purchases for middle class families, and if you didn’t have one you better have bus money to go to the local library to look up their copy. In the 1990s the traditional encyclopaedias were largely killed by low-cost CD ROMs… before Wikipedia appeared. Wikipedia is nearly free (you still need an internet connection) and vastly more extensive than any traditional encyclopaedia. But the Internet is vastly larger than Wikipedia as a repository of knowledge. The curious kid also has the same access to the ArXiv preprint server as any research physicist: they can reach the latest paper at the same time. Not to mention free educational courses, raw data, tutorials, and ways of networking with other interested people.
Wikipedia is also good demonstration of how the rules change when you get something cheap enough – having volunteers build and maintain something as sophisticated as an encyclopaedia requires a large and diverse community (it is often better to have many volunteers than a handful of experts, as competitors like Scholarpedia have discovered), and this would not be possible without easy access. It also illustrates that new things can be made in “alien” ways that cannot be predicted before they are tried.
Risk
But our risks may have grown too.
1957 also marks the launch of the first ICBM, a Soviet R-7. In many ways it is intrinsically linked to spaceflight: an ICBM is just a satellite with a ground-intersecting orbit. If you can make one, you can build the other.
By 1957 the nuclear warhead stockpiles were going up exponentially and had reached 10,000 warheads, each potentially able to destroy a city. Yields of thermonuclear weapons were growing larger, as imprecise targeting made it reasonable to destroy large areas in order to guarantee destruction of the target.
Nuclear warhead stockpiles. From the Center of Arms Control and Non-Proliferation.
While the stockpiles have decreased and the tensions are not as high as during the peak of the cold war in the early 80s, we have more nuclear powers, some of which are decidedly unstable. The intervening years have also shown a worrying number of close calls – not just the Cuban Missile crisis but many other under-reported crises, flare-ups and technical mishaps (Indeed, in May 22 1957 a 42,000-pound hydrogen bomb accidentally fell from a bomber near Albuquerque). The fact that we got out of the Cold War unscathed is surprising – or maybe not, since we would not be having this discussion if it had turned hot.
The biological risks are also with us. The Asian Bird Flu pandemic in 1957 claimed over 150,000 lives world-wide. Current gain-of-function research may, if we are very unlucky, lead to a man-made pandemic with a worse outcome. The paradox here is that this particular research is motivated by a desire to understand how bird flu can make the jump from birds to an infectious human pathogen: we need to understand this better, yet making new pathogens may be a risky path.
The SARS and Ebola crises show that we both have become better at handling a pandemic emergency, but also have far to go. It seems that the natural biological risk may have gone down a bit because of better healthcare (and increased a bit due to more global travel), but the real risks from misuse of synthetic biology are not here yet. While biowarfare and bioterrorism are rare, they can have potentially unbounded effects – and cheaper, more widely available technology means it may be harder to control what groups can attempt it.
1957 also marks the year when Africanized bees escaped in Brazil, becoming one of the most successful and troublesome invasive (sub)species. Biological risks can be directed to agriculture or the ecosystem too. Again, the intervening 60 years have shown a remarkably mixed story: on one hand significant losses of habitat, the spread of many invasive species, and the development of anti-agricultural bioweapons. On the other hand a significant growth of our understanding of ecology, biosafety, food security, methods of managing ecosystems and environmental awareness. Which trend will win out remains uncertain.
The good news is that risk is not a one-way street. We likely have reduced the risk of nuclear war since the heights of the Cold War. We have better methods of responding to pandemics today than in 1957. We are aware of risks in a way that seems more actionable than in the past: risk is something that is on the agenda (sometimes excessively so).
Coordination
1957/1958 was the International Geophysical Year. The Geophysical Year saw the US and Soviet Union – still fierce rivals – cooperate on understanding and monitoring the global system, an ever more vital part of our civilization.
1957 was also the year of the treaty of Rome, one of the founding treaties of what would become the EU. For all its faults the European Union demonstrates that it is possible through trade to stabilize a region that had been embroiled in wars for centuries.
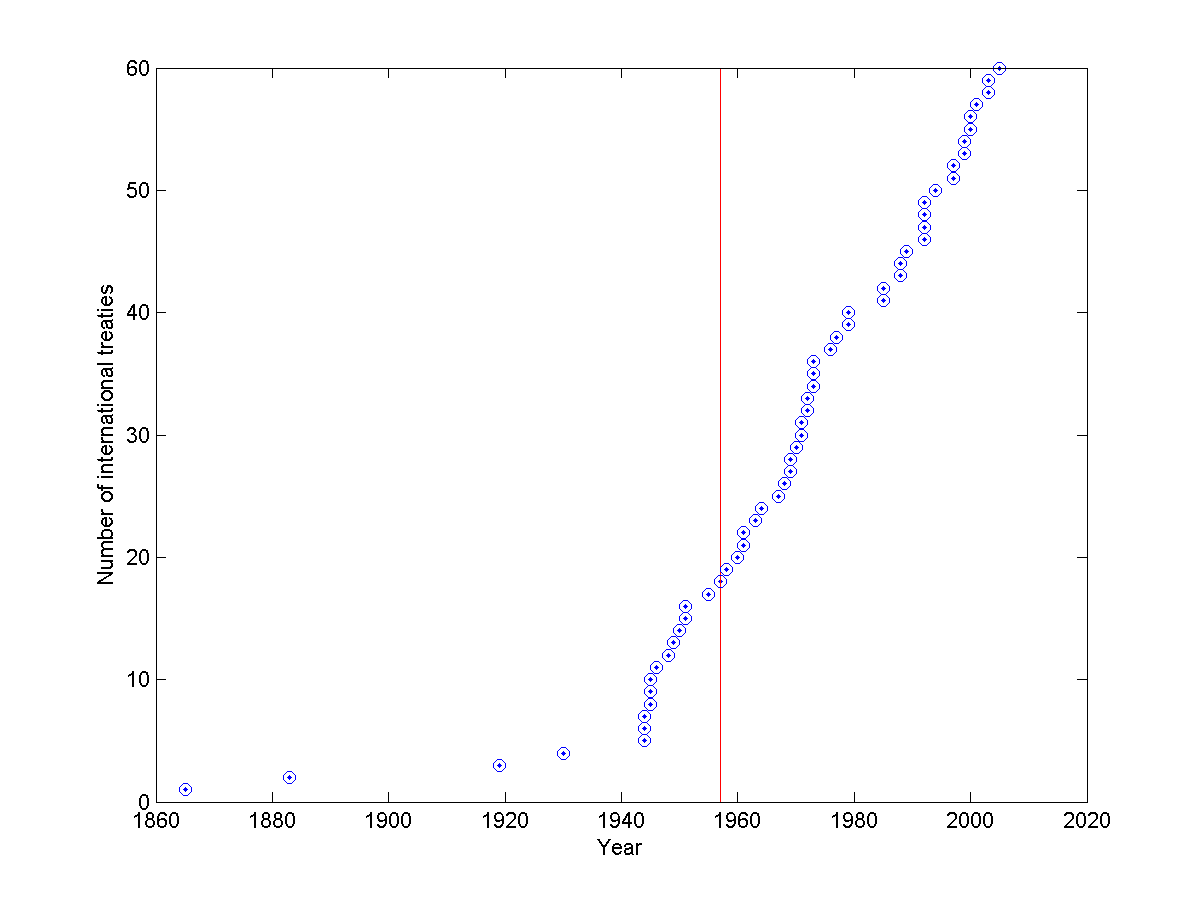
Number of international treaties over time. Data from Wikipedia.
The number of international treaties has grown from 18 in 1957 to 60 today. While not all represent sterling examples of cooperation they are a sign that the world is getting somewhat more coordinated.
Globalisation means that we actually care about what goes on in far corners of the world, and we will often hear about it quickly. It took days after the Chernobyl disaster in 1986 before it was confirmed – in 2011 I watched the Fukushima YouTube clip 25 minutes after the accident, alerted by Twitter. It has become harder to hide a problem, and easier to request help (overcoming one’s pride to do it, though, remains as hard as ever).
The world on 1957 was closed in many ways: two sides of the Cold War, most countries with closed borders, news traveling through narrow broadcasting channels and transport/travel hard and expensive. Today the world is vastly more open, both to individuals and to governments. This has been enabled by better coordination. Ironically, it also creates more joint problems requiring joint solutions – and the rest of the world will be watching the proceedings, noting lack of cooperation.
Final thoughts
The real challenges for our technological future are complexity and risk.
We have in many ways plucked the low-hanging fruits of simple, high-performance technologies that vastly extend our reach in energy, material wealth, speed and so on, but run into subtler limits due to the complexity of the vast technological systems we need. The problem of writing software today is not memory or processing speed but handling a myriad of contingencies in distributed systems subject to deliberate attacks, emergence, localization, and technological obsolescence. Biotechnology can do wonders, yet has to contend with organic systems that have not been designed for upgradeability and spontaneously adapt to our interventions. Handling complex systems is going to be the great challenge for this century, requiring multidisciplinary research and innovations – and quite likely some new insights on the same level as the earth-shattering physical insights of the 20th century.
More powerful technology is also more risky, since it can have greater consequences. The reach of the causal chains that can be triggered with a key press today are enormously longer than in 1957. Paradoxically, the technologies that threaten us also have the potential to help us reduce risk. Spaceflight makes ICBMs possible, but allows global monitoring and opens the possibility of becoming a multi-planetary species. Biotechnology allows for bioweapons, but also disease surveillance and rapid responses. Gene drives can control invasive species and disease vectors, or sabotage ecosystems. Surveillance can threaten privacy and political freedom, yet allow us to detect and respond to collective threats. Artificial intelligence can empower us, or produce autonomous technological systems that we have no control over. Handling risk requires both having an adequate understanding of what matters, designing the technologies, institutions or incentives that can reduce the risk – and convincing the world to use them.
The future of our species depends on what combination of technology, insight and coordination ability we have. Merely having one or two of them is not enough: without technology we are impotent, without insight we are likely to go in the wrong direction, and without coordination we will pull apart.
Fortunately, since 1957 I think we have not just improved our technological abilities, but we have shown a growth of insight and coordination ability. Today we are aware of global environmental and systemic problems to a new degree. We have integrated our world to an unprecedented degree, whether through international treaties, unions like the EU, or social media. We are by no means “there” yet, but we have been moving in the right direction. Hence I think we never had it so good.
[1]Freeman Dyson, Imagined Worlds. Harvard University Press (1997) P. 34-37, p. 183-185




/N \ll 1")