 Continuing my intermittent Newtonmas fractal tradition (2014, 2016, 2018), today I play around with a very suitable fractal based on gravity.
Continuing my intermittent Newtonmas fractal tradition (2014, 2016, 2018), today I play around with a very suitable fractal based on gravity.
The problem
On Physics StackExchange NiveaNutella asked a simple yet tricky to answer question:
If we have two unmoving equal point masses in the plane (let’s say at ")
User Kasper showed that one can reframe the problem in terms of elliptic coordinates and show that this implies a straight boundary, while User Lineage showed it more simply using the second constant of motion. I have the feeling that there ought to be an even simpler argument. Still, Kasper’s solution show that the generic trajectory will quasiperiodically fill a region and tend to come arbitrarily close to one of the masses.
The fractal
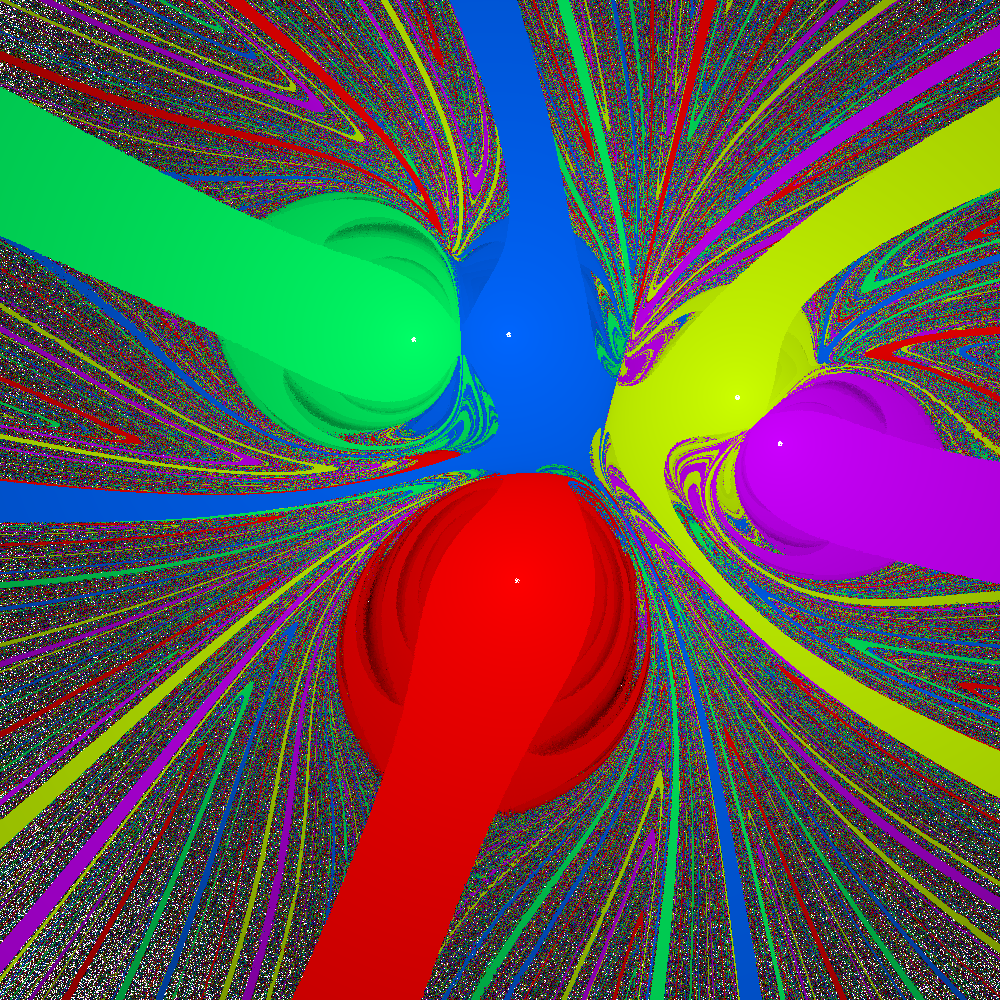
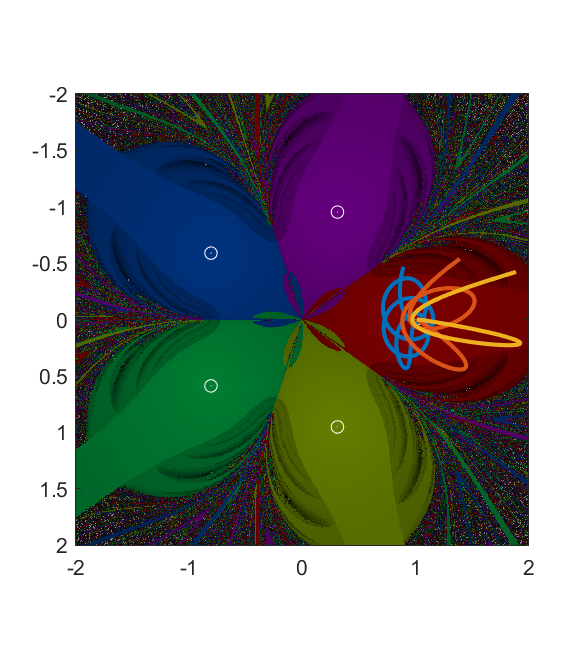
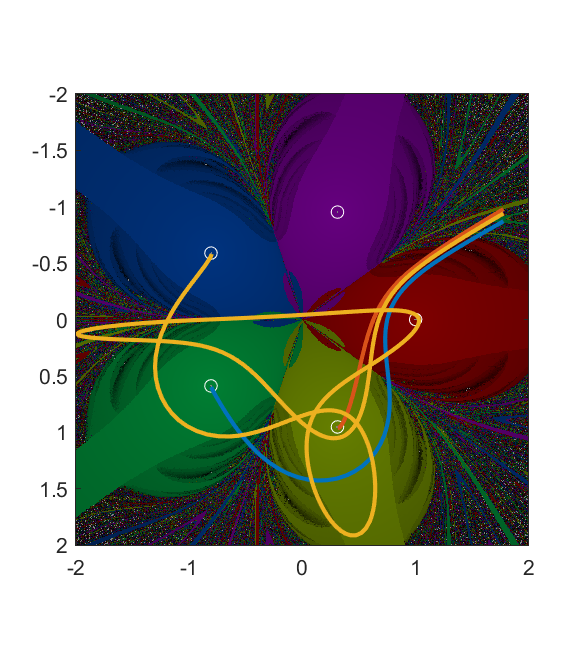
In any case, here is a plot of the basins of attraction shaded by the time until getting within a small radius 
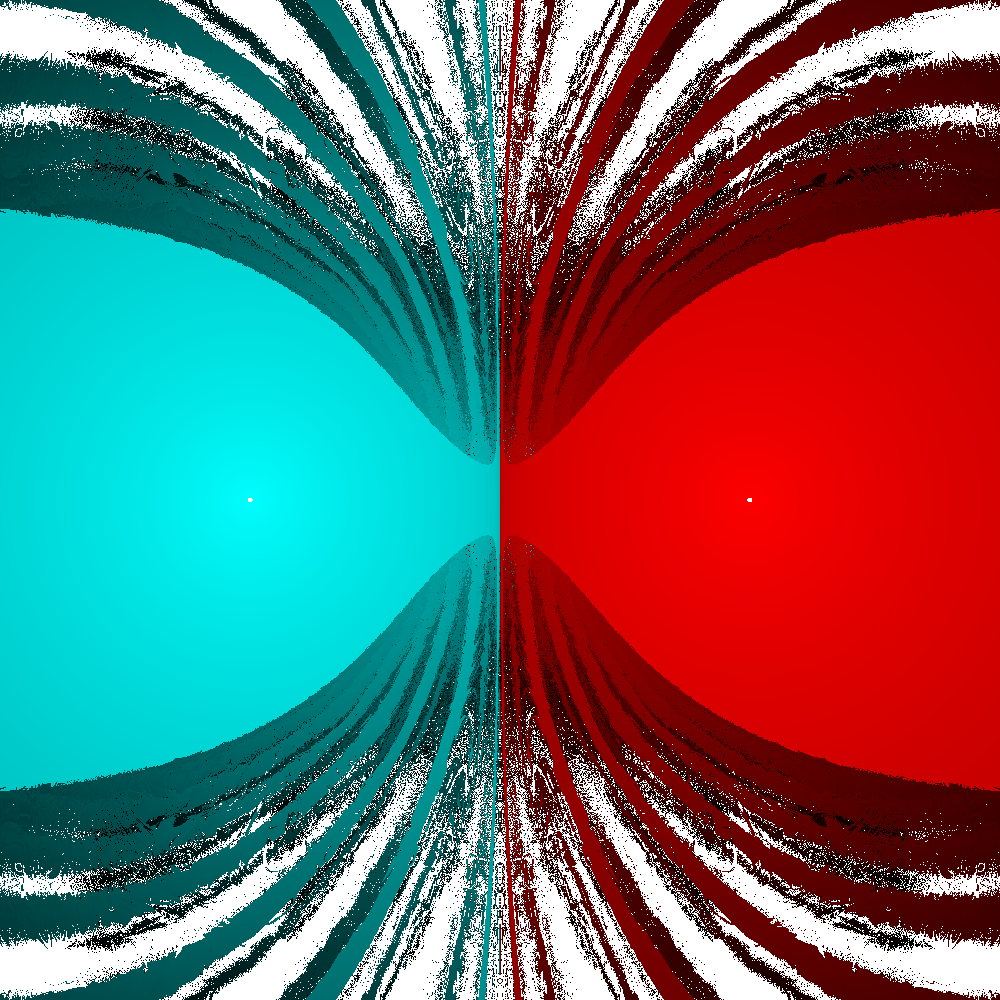
The boundary is a straight line, and surrounding the simple regions where orbits fall nearly straight into the nearest mass are the wilder regions where orbits first rock back and forth across the x-axis before settling into ellipses around the masses.
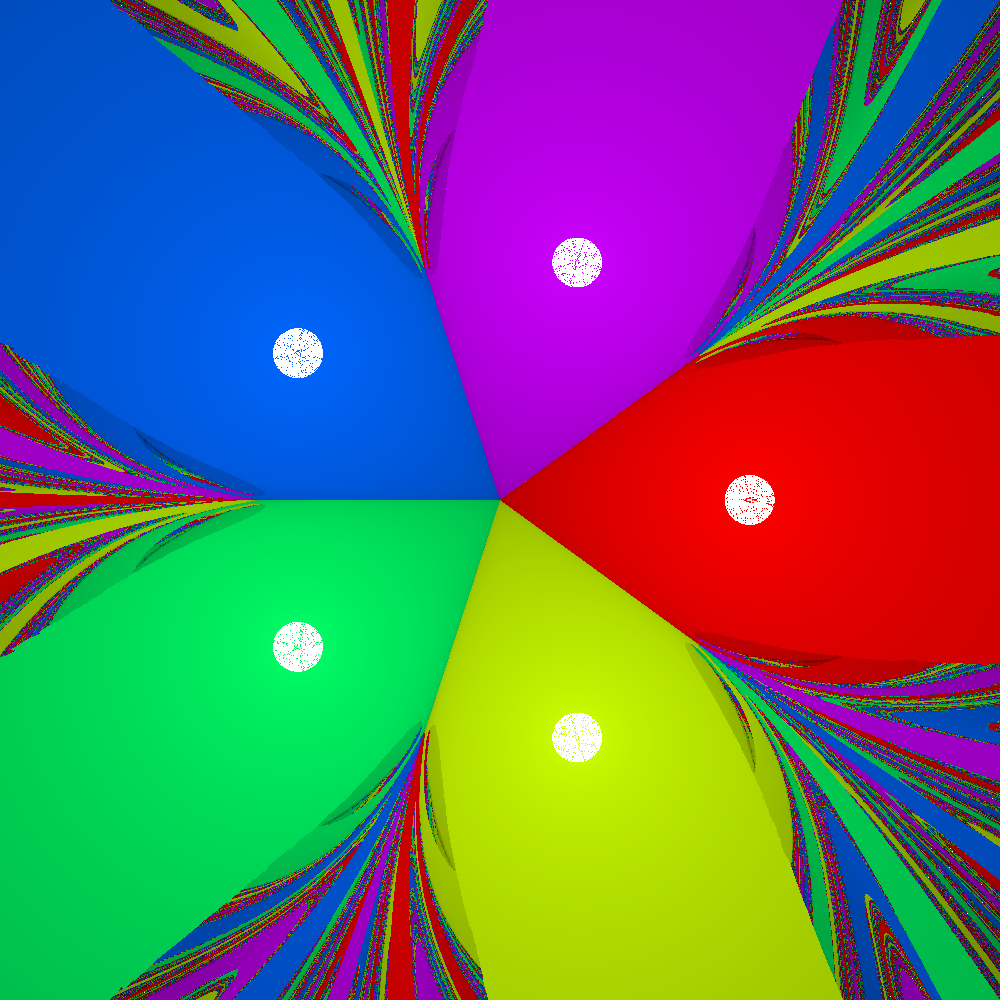
The case for 5 evenly spaced masses for 


As 
I cannot claim credit for this fractal, as NiveaNutella already plotted it. But it still fascinates me.

Wada basins and mille-feuille collision manifolds
These patterns are somewhat reminiscent of the classic Newton’s root-finding iterative formula fractals: several basins of attraction with a fractal border where pairs of basins encounter interleaved tiny parts of basins not member of the pair.
However, this dynamics is continuous rather than discrete. The plane is a 2D section through a 4D phase space, where starting points at zero velocity accelerate so that they bob up and down/ana and kata along the velocity axes. This also leads to a neat property of the basins of attraction: they are each arc-connected sets, since for any two member points that are the start of trajectories they end up in a small ball around the attractor mass. One can hence construct a map from ![[0,1]](http://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=000000&s=0 "[0,1]")
")
Each mass is surrounded by a set of trajectories hitting it exactly, which we can parametrize by the angle they make and the speed they have inwards when they pass some circle around the mass point. They hence form a 3D manifold 
")


The magnetic pendulum
This fractal is similar to one I made back in 1990 inspired by the dynamics of the magnetic decision-making desk toy, a pendulum oscillating above a number of magnets. Eventually it settles over one. The basic dynamics is fairly similar (see Zhampres’ beautiful images or this great treatment). The difference is that the gravity fractal has no dissipation: in principle orbits can continue forever (but I end when they get close to the masses or after a timeout) and in the magnetic fractal the force dependency was bounded, a ")

That simulation was part of my epic third year project in the gymnasium. The topic was “Chaos and self-organisation”, and I spent a lot of time reading the dynamical systems literature, running computer simulations, struggling with WordPerfect’s equation editor and producing a manuscript of about 150 pages that required careful photocopying by hand to get the pasted diagrams on separate pieces of paper to show up right. My teacher eventually sat down with me and went through my introduction and had me explain Poincaré sections. Then he promptly passed me. That was likely for the best for both of us.
Appendix: Matlab code
showPlot=0; % plot individual trajectories
randMass = 0; % place masses randomly rather than in circle
RTRAP=0.0001; % size of trap region
tmax=60; % max timesteps to run
S=1000; % resolution
x=linspace(-2,2,S);
y=linspace(-2,2,S);
[X,Y]=meshgrid(x,y);
N=5;
theta=(0:(N-1))*pi*2/N;
PX=cos(theta); PY=sin(theta);
if (randMass==1)
s = rng(3);
PX=randn(N,1); PY=randn(N,1);
end
clf
hit=X*0;
hitN = X*0; % attractor basin
hitT = X*0; % time until hit
closest = X*0+100;
closestN=closest; % closest mass to trajectory
tic; % measure time
for a=1:size(X,1)
disp(a)
for b=1:size(X,2)
[t,u,te,ye,ie]=ode45(@(t,y) forceLaw(t,y,N,PX,PY), [0 tmax], [X(a,b) 0 Y(a,b) 0],odeset('Events',@(t,y) finishFun(t,y,N,PX,PY,RTRAP^2)));
if (showPlot==1)
plot(u(:,1),u(:,3),'-b')
hold on
end
if (~isempty(te))
hit(a,b)=1;
hitT(a,b)=te;
mind2=100^2;
for k=1:N
dx=ye(1)-PX(k);
dy=ye(3)-PY(k);
d2=(dx.^2+dy.^2);
if (d2<mind2) mind2=d2; hitN(a,b)=k; end
end
end
for k=1:N
dx=u(:,1)-PX(k);
dy=u(:,3)-PY(k);
d2=min(dx.^2+dy.^2);
closest(a,b)=min(closest(a,b),sqrt(d2));
if (closest(a,b)==sqrt(d2)) closestN(a,b)=k; end
end
end
if (showPlot==1)
drawnow
pause
end
end
elapsedTime = toc
if (showPlot==0)
% Make colorful plot
co=hsv(N);
mag=sqrt(hitT);
mag=1-(mag-min(mag(:)))/(max(mag(:))-min(mag(:)));
im=zeros(S,S,3);
im(:,:,1)=interp1(1:N,co(:,1),closestN).*mag;
im(:,:,2)=interp1(1:N,co(:,2),closestN).*mag;
im(:,:,3)=interp1(1:N,co(:,3),closestN).*mag;
image(im)
end
% Gravity
function dudt = forceLaw(t,u,N,PX,PY)
%dudt = zeros(4,1);
dudt=u;
dudt(1) = u(2);
dudt(2) = 0;
dudt(3) = u(4);
dudt(4) = 0;
dx=u(1)-PX;
dy=u(3)-PY;
d=(dx.^2+dy.^2).^-1.5;
dudt(2)=dudt(2)-sum(dx.*d);
dudt(4)=dudt(4)-sum(dy.*d);
% for k=1:N
% dx=u(1)-PX(k);
% dy=u(3)-PY(k);
% d=(dx.^2+dy.^2).^-1.5;
% dudt(2)=dudt(2)-dx.*d;
% dudt(4)=dudt(4)-dy.*d;
% end
end
% Are we close enough to one of the masses?
function [value,isterminal,direction] =finishFun(t,u,N,PX,PY,r2)
value=1000;
for k=1:N
dx=u(1)-PX(k);
dy=u(3)-PY(k);
d2=(dx.^2+dy.^2);
value=min(value, d2-r2);
end
isterminal=1;
direction=0;
end